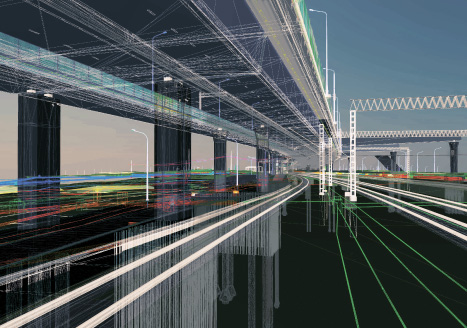
弊社がご提案する高精度3次元道路地図(HDマップ)は、MMS計測車で計測した点群データを高精度に図化した上で、「滑らかなステアリング操作による乗り心地の良さ」と「低燃費」を実現できる数式仮想軌道(クロソイド曲線)による道路中心線形を実装した地図です。

高精度3次元道路地図(HDマップ)の必要性
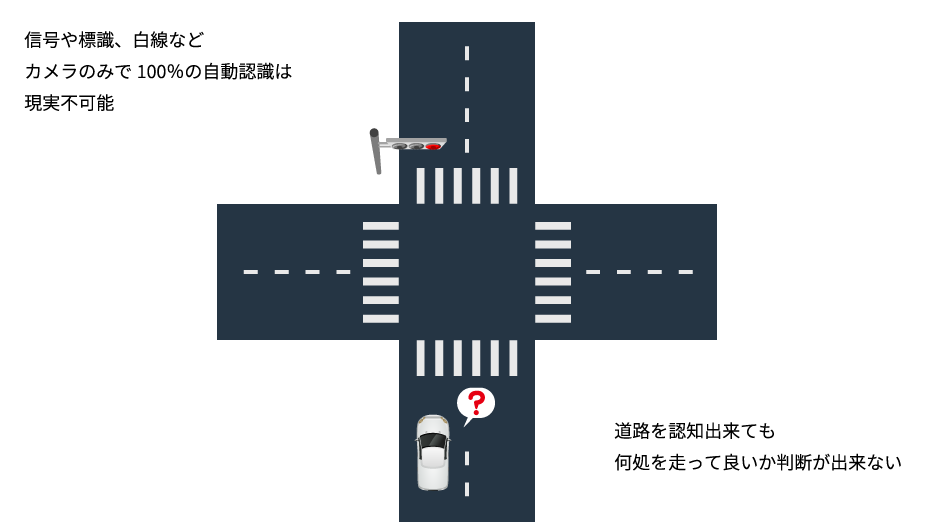
自動運転レベル2(システムがステアリングを操作し、ステアリング補正やスピード調整のどちらもドライバーがサポート)では、高速道路の同一車線内走行や車線変更支援と言う、あくまでもドライバー支援の上に成り立つ運転支援技術のため、高精度3次元道路地図(HDマップ)は必要とされていません。
しかし、自動運転レベル3 (特定の場所ではシステムが全てを操作し、緊急時はドライバーが操作)以上では高精度3次元道路地図(HDマップ)は必須と言われています。
-
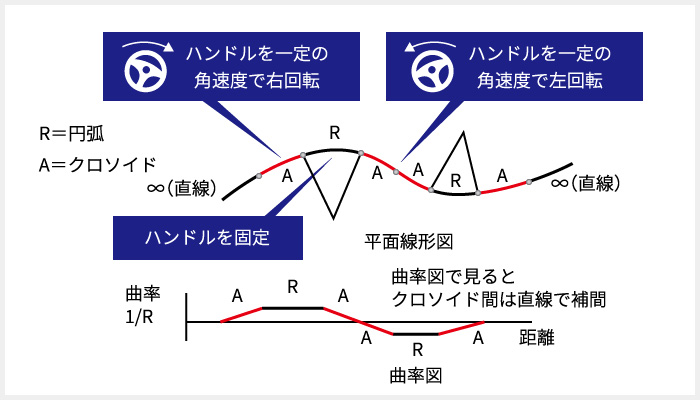 クロソイド曲線とその活用価値
クロソイド曲線とその活用価値第一次大戦後にドイツのアウトバーン建設にて世界で初めて使用され、世界中の道路や戦後の日本における道路建設、特に高速道路等の設計では必ず使用されている緩和曲線です。
その特徴は、自動車の運転において、運転者が一定の走行速度でハンドルを一定の角速度で回した場合、自動車が走行した軌跡はクロソイド曲線を描くことにあります。よって、その他の曲線(ポリライン、Bスプライン等)よりも自動車の走行原理と非常に親和性の高い曲線です。 -
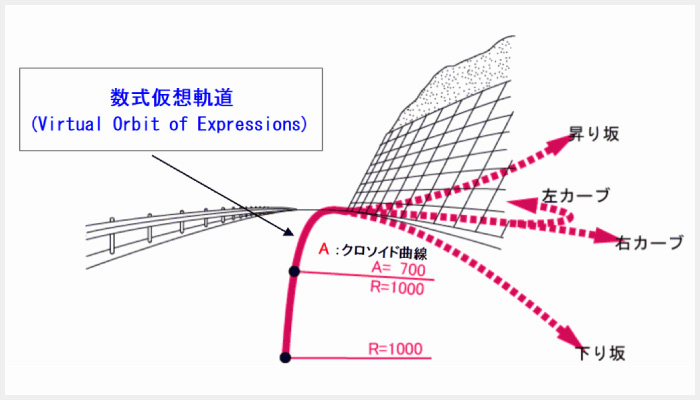 数式仮想軌道(Virtual Orbit)の概念
数式仮想軌道(Virtual Orbit)の概念数式仮想軌道は、道路線形データを一定間隔のポリライン(折れ線)で構成するのではなく、直線・クロソイド曲線・円弧で構成される道路線形(上り坂、下り坂、右カーブ、左カーブ)を各構成要素が持つパラメータと数式で表現するデジタル仮想レールです。
そのため、データ量も圧倒的に軽く(カーナビ地図の約100分の1以下)、かつ、高精度3次元道路地図(HDマップ)を数式で先読みすることができるため、乗り心地が良く、かつ、低燃費な走行運転の制御に利用できます。

-
virtual orbit
-
 Virtual Orbitが実装された高精度3次元道路地図
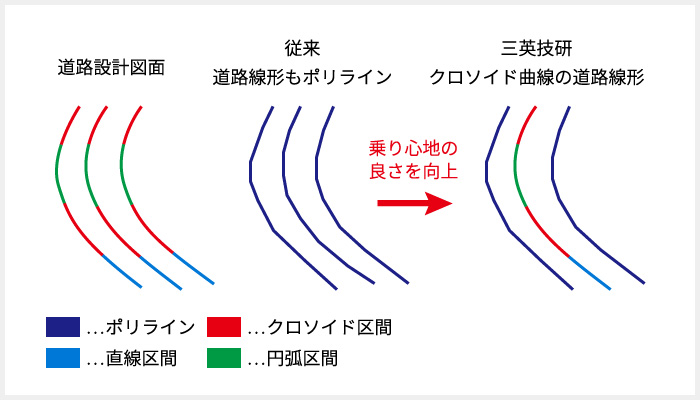
Virtual Orbitが実装された高精度3次元道路地図現在市場に提供されている高精度3次元道路地図(HDマップ)は、ポリライン(折れ線)で作成されているため、自動運転に必要な道路中心線形もポリラインであり、ハンドルを滑らかに回転させることができません。乗り心地が良い自動運転を実現するめには、クロソイド曲線で構成される数式仮想軌道(Virtual Orbit)の実装が有効です。
-
 カーブの曲率から見たクロソイド曲線の有効性
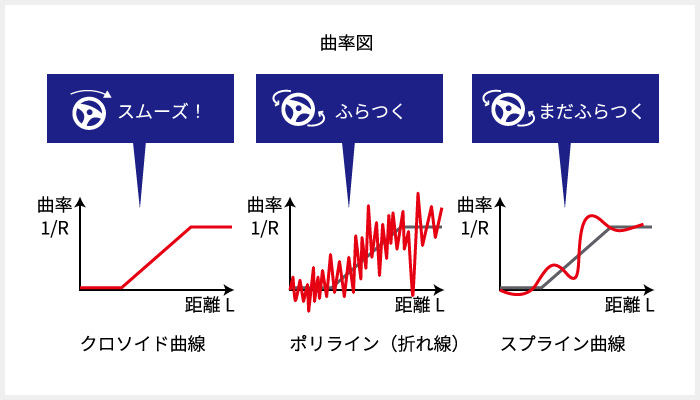
カーブの曲率から見たクロソイド曲線の有効性クロソイド曲線とポリライン(折れ線)やスプライン曲線を曲率図で比較すると、クロソイド曲線に従ってステアリングを操作する方が滑らかに操作できることを確認できます。
曲率図とは横軸を距離(L)、縦軸を曲率半径(R)の逆数の曲率(1/R)で表すグラフで、道路設計で通常用いられる評価図です。 -
 走行の安定性と乗り心地の良さを実現する先読み制御
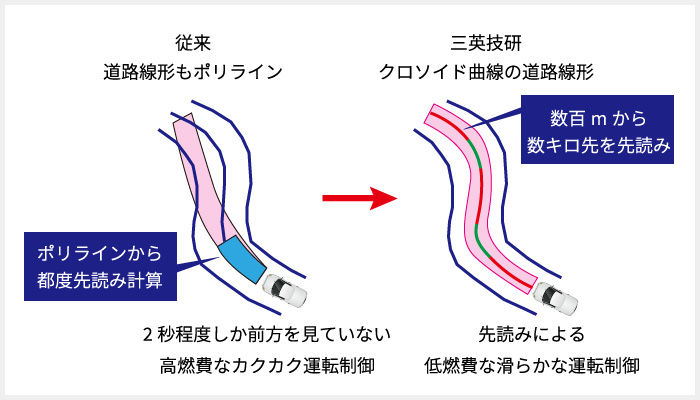
走行の安定性と乗り心地の良さを実現する先読み制御従来の高精度3次元道路地図(HD マップ)はポリライン(折れ線)で作成されているため、2秒程度の先を読んでカーブの曲率半径を求める事が限界です。また半径の異なる円弧が連続し、かつ曲率半径が非常にバラつくため走行の安定性や乗り心地の改善が望まれています。
その解決策として、弊社はクロソイド曲線を用いた数式仮想軌道の採用をご提案しており、カーブの先まで先読みできるようになることから、安定した自動運転制御が可能となり、乗り合いの公共交通のバスや壊れやすい荷物を運搬するトラックに対して大きなメリットを齎します。 -
 低燃費を実現する先読み制御
低燃費を実現する先読み制御燃費の改善は自動車メーカーにとって非常に重要なテーマであり、CO2の削減も含めて世界各国から要求される最重要課題です。特に、商用車は外観等よりも燃費性能が収益に直結するため、クロソイド曲線を用いた数式仮想軌道(Virtual orbit))を採用する事により、以下の2点の改善が見込まれます。
■スムーズなハンドル操作
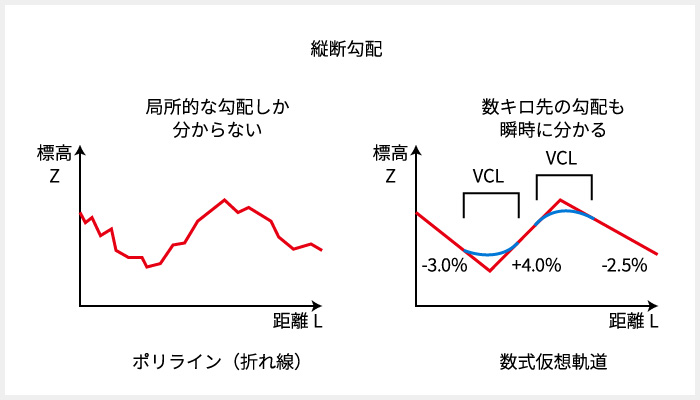
■縦断、横断勾配を考慮した制御

数式仮想軌道を用いた自動運転制御の有効性
そして、カーブ走行時の操舵のフラつきは、ポリラインよりもVirtual Orbitの方が少なく、低燃費で短時間に目的地まで走行できることを確認できました。

-
走行目標データ
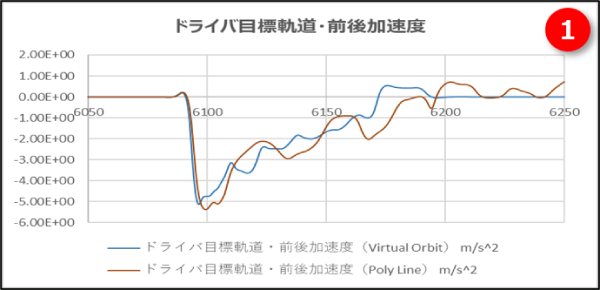
Virtual Orbitはカーブ進入後、Poly Lineよりも加速度が安定して見れる
-

-
走行結果データ
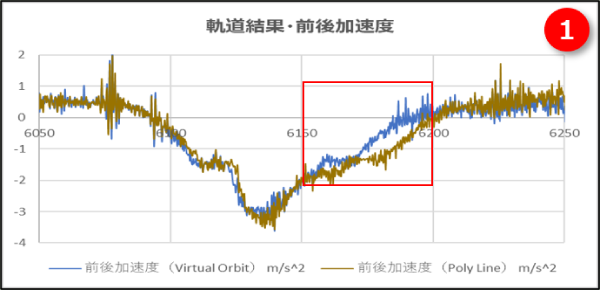
Virtual Orbitはカーブ進入後、Poly Lineよりも加速せずに走行出来る
-
走行目標データ
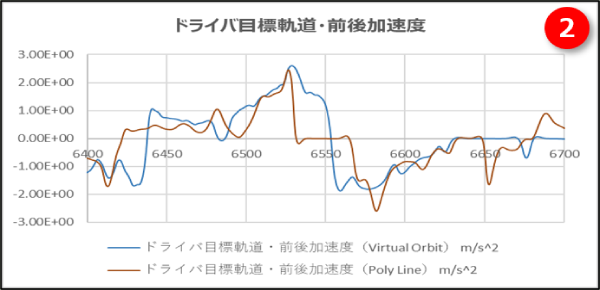
Poly LineよりもVirtual Orbitはクロソイド区間を上手く使った加減速を目標設定した
-
-
走行結果データ
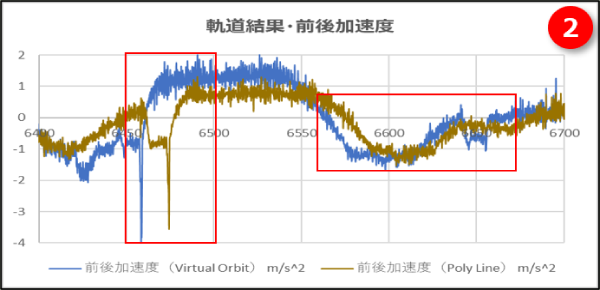
Virtual OrbitはPoly Lineよりも早めに加速出来て滑らかに立ち上がった
-
走行結果データ
-
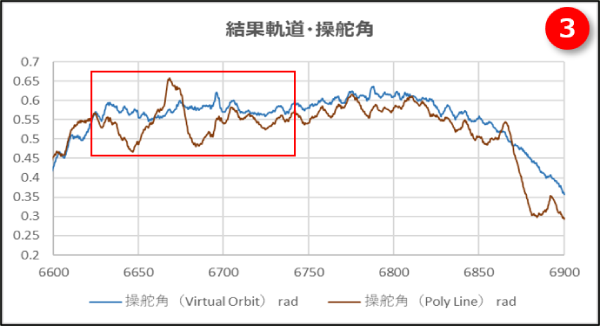
Virtual OrbitはPoly Lineよりも操舵のフラつきが少なくカーブを走行した
-
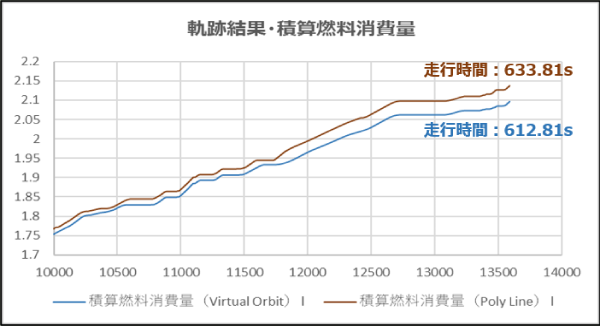
Virtual OrbitはPoly Lineよりも低燃費かつ短時間で走行した
-
CarMakerを使用した走行シミュレーションの比較動画
濃い黄色の車:『Virtual Orbit』のコースで走行 薄い黄色の車:『ポリライン(折れ線)』のコースで走行
-
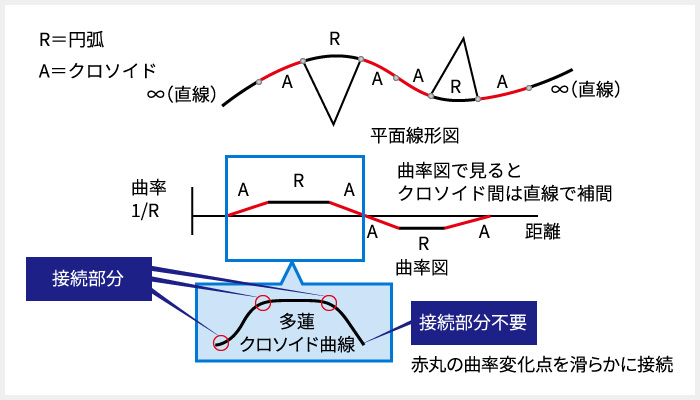 多連クロソイド曲線の特徴
多連クロソイド曲線の特徴多連クロソイド曲線とは、平面線形で「直線と円弧」「円弧と円弧」の間に挿入するクロソイド曲線(緩和曲線)を、曲率の変化を滑らかにして接続することができる走行路緩和曲線です。図に示す赤丸部分を滑らかに接続することができます。
-
 多連クロソイド曲線を用いた曲率変化の滑らかな走行路緩和曲線の提案
多連クロソイド曲線を用いた曲率変化の滑らかな走行路緩和曲線の提案 -
 多連クロソイド曲線を用いた曲率変化の滑らかな走行路緩和曲線の提案(第3報:車線変更への適用)
多連クロソイド曲線を用いた曲率変化の滑らかな走行路緩和曲線の提案(第3報:車線変更への適用)

-
TruckMakerを使用した走行シミュレーション
-
CarMakerを使用した走行シミュレーション動画